Automate
The Project
Driver and automation have to be considered as team members who share the driving task and who are both responsible for the safety of driving. The object of design is not the automation system but the overall driver-automation team.AutoMate will create a highly reliable automated driving system that users can understand, accept, trust and eventually will regularly use.
This project has received funding from the European Union’s Horizon 2020 research and innovation programme under Grant Agreement no.690705
Objectives of the Project
Handle critical situations
Develop solutions for flexible, gradual and smooth distribution of tasks between driver and automation to better handle critical driving situations.
Anticipate the driver’s reflexes
-Develop solutions to monitor, understand, assess and anticipate the driver, the vehicle and the traffic situation.
-Make a human-like experience
-Develop solutions allowing the TeamMate Car to plan and execute driving maneuvers in a human expert-like way.
-Always guarantee safety
-Develop solutions to assess and guarantee safety of all manual and automatically generated maneuvers at any time.
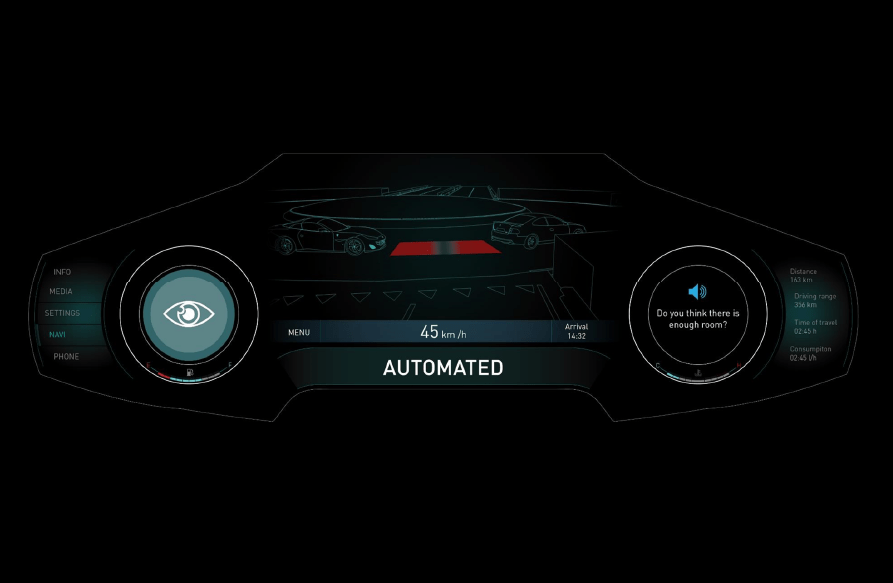
-Develop solutions for optimized human-machine interaction.
-Efficiency in real life conditions
-Develop demonstrators to test the safety, efficiency and effectiveness of the TeamMate technologies in real life conditions and consider security, legal and societal issues.
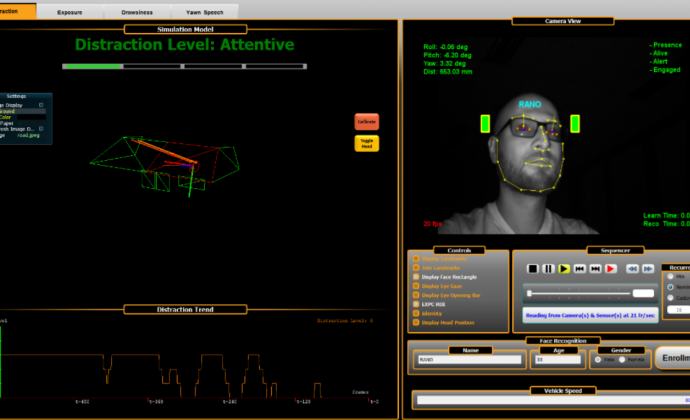
Driver monitoring
We delivered a conceptual framework, software implemented Teammate enabling techniques and a system architecture that have been used during the project to build TeamMate Car demonstrators and that can be reused after the project to equip highly automated systems with sophisticated human-machine cooperation capabilities.
Conceptual framework for driver automation teamwork.
New knowledge on driver behaviour and cognition in highly dynamic traffic situations.
Fully implemented, evaluated and reusable driver models to infer driver states and intentions.
Fully implemented, evaluated and reusable situation and vehicle models.
Fully implemented, evaluated and reusable safe manoeuvre planning, execution & learning algorithms.
Fully implemented software sensor and communication platform.
Evaluated & demonstrated driver-automation communication concepts & reference implementations.
Evaluated and demonstrated Teammate Car prototypes.
Gallery

Next project
Jump
Keep in contact.
If you are interested in collaborating with us or if you would like information about our services, please contact us and we will be happy to help. Let’s get in touch and make something great happen.